

Latest Blog
Blog
Defense Upgrades Call for the Best Optical Systems at the 2026 SPIE Defense + Security

Daniela Dandes
Apr 17, 2026

Latest Blog
Blog
Mentoring the Next Generation of Optics Disruptors with Lars Sandström
Daniela Dandes
Apr 02, 2026

Latest Blog
Blog
Non-Negotiables for Space: Testing Optics via Vacuum-Compatible Metrology Solutions
Daniela Dandes
Mar 26, 2026
Latest Blog
Blog
Rising to the Challenge in 2026 at Optikos
Daniela Dandes
Feb 20, 2026

Latest Blog
Blog
The Photonics Industry Is Growing Up: Our Take on Photonics West 2026
Daniela Dandes
Feb 05, 2026
Latest Blog
Blog
Understanding the Design-to-Testing Gap in Biomedical Optical Systems at Photonics West 2026
Daniela Dandes
Jan 15, 2026

Articles
Ask The Optical Engineering Experts®
09/29/2025
Articles
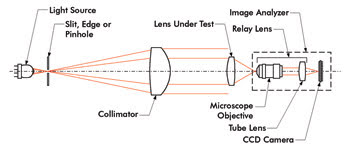
How to Measure MTF and other Properties of Lenses
01/01/2024

Articles
Compensation Methods for Glass Tolerances: Performance and Manufacturing Considerations
06/30/2021
Articles
MTF Measurement at Proper Conjugates
11/09/2020
Articles
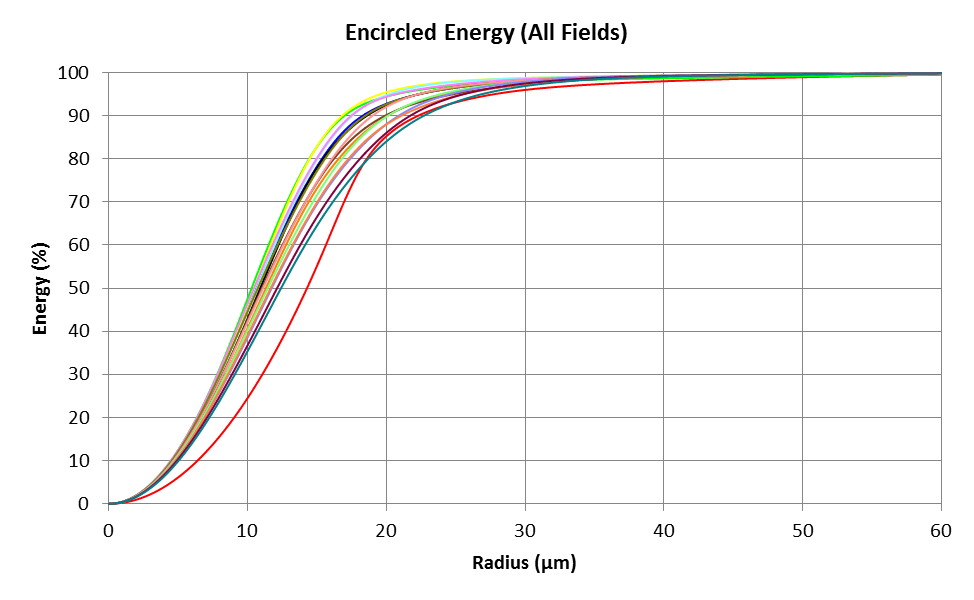
Encircled Energy and Ensquared Energy on LensCheck™ Lens Measurement Systems
07/23/2020
Articles
Stray Light Measurement on LensCheck™ Lens Measurement Systems
01/07/2020
Articles
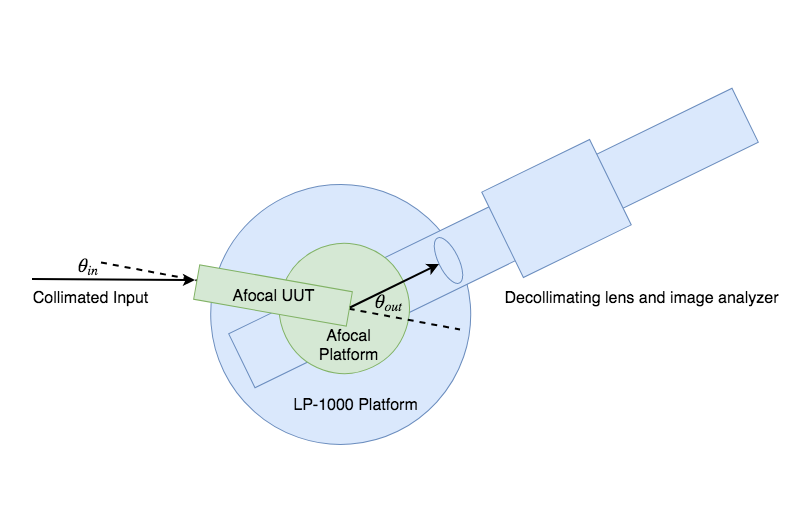
Afocal MTF Measurement
06/22/2018
Articles
MTF Metrology for High-NA Microscope Objectives
04/21/2017
Articles
Why Measure MTF?
10/09/2015